| Observation Types | Description |
|---|
| Ingress solar occultation | Normal solar occultation starting when the line of sight is above the atmosphere and ending when sun is blocked by the surface |
| Egress solar occultation | Normal solar occultation starting when the line of sight to the sun is blocked by the surface and ending when it is above the atmosphere |
| Merged solar occultation | Double solar occultation, consisting of an ingress, starting above atmosphere, and an egress, ending above atmosphere. These occur when there is insufficient time between the ingress and egress to cool down the infrared detector for the second measurement |
| Grazing solar occultation | Solar occultation where, due to orbital geometry, the sun is never blocked by the surface. Starting above the atmosphere, the line of sight passes through the atmosphere to a minimum altitude, then increases to end above the atmosphere |
| Dayside Nadir | Nadir measurement on the illuminated side of the planet. Observations can be of variable length, beginning and ending near the nightside terminator to cover the whole dayside, or shorter and centred on the subsolar latitude. Can also be split into 3 separate measurements |
| Nightside Nadir | Nadir measurement on the nightside of the planet |
| Limb | Measurement of the illuminated limb of the planet |
| Calibration | Many types e.g. sun pointing, solar line scan, etc. |
| Measurement Types - SO/LNO Channels | Description |
|---|
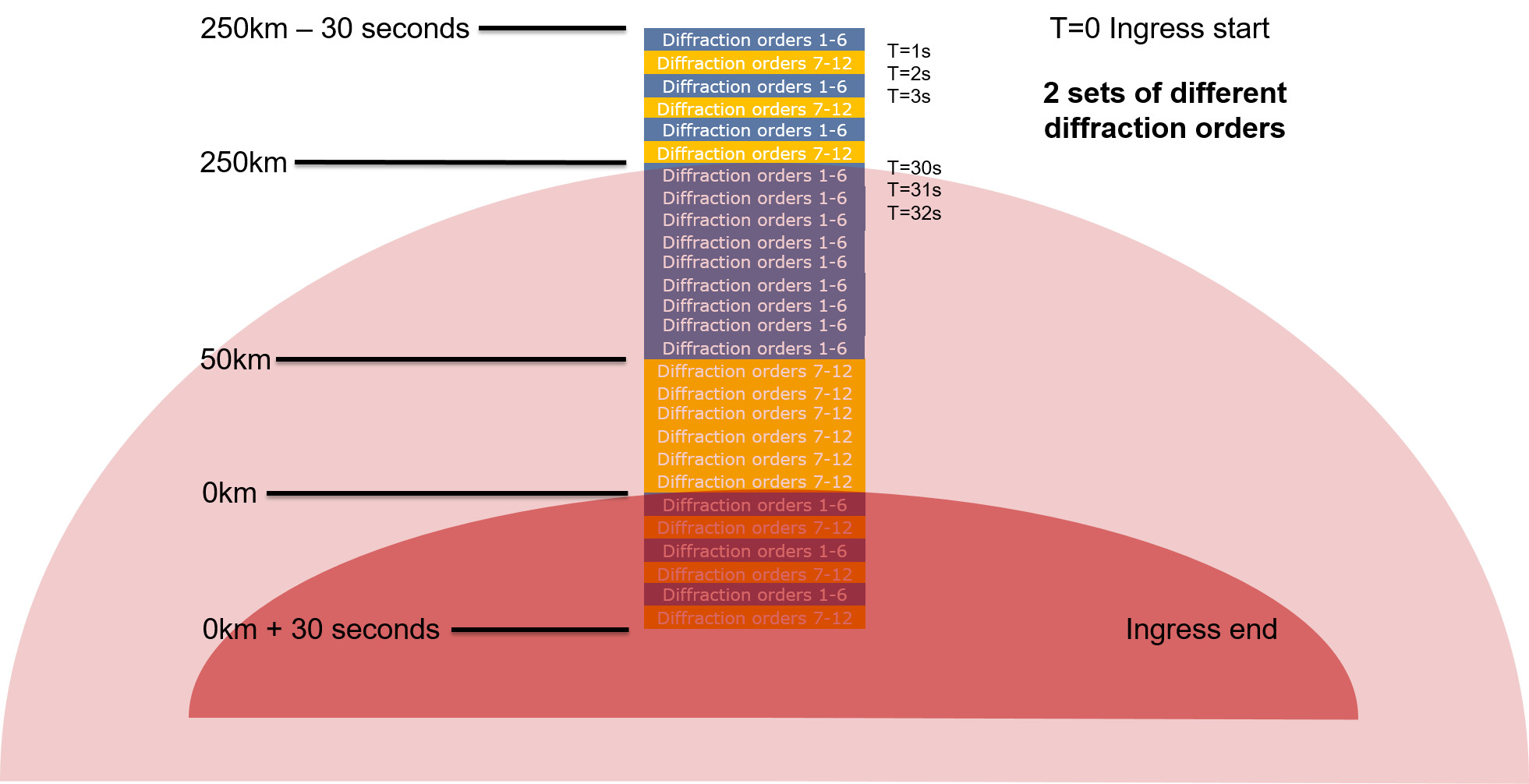
| Solar occultation (50km switch) | 5 diffraction orders + 1 dark per second. When the line of sight reaches 50km , the combination of diffraction orders being measured is changed. No onboard background subtraction |
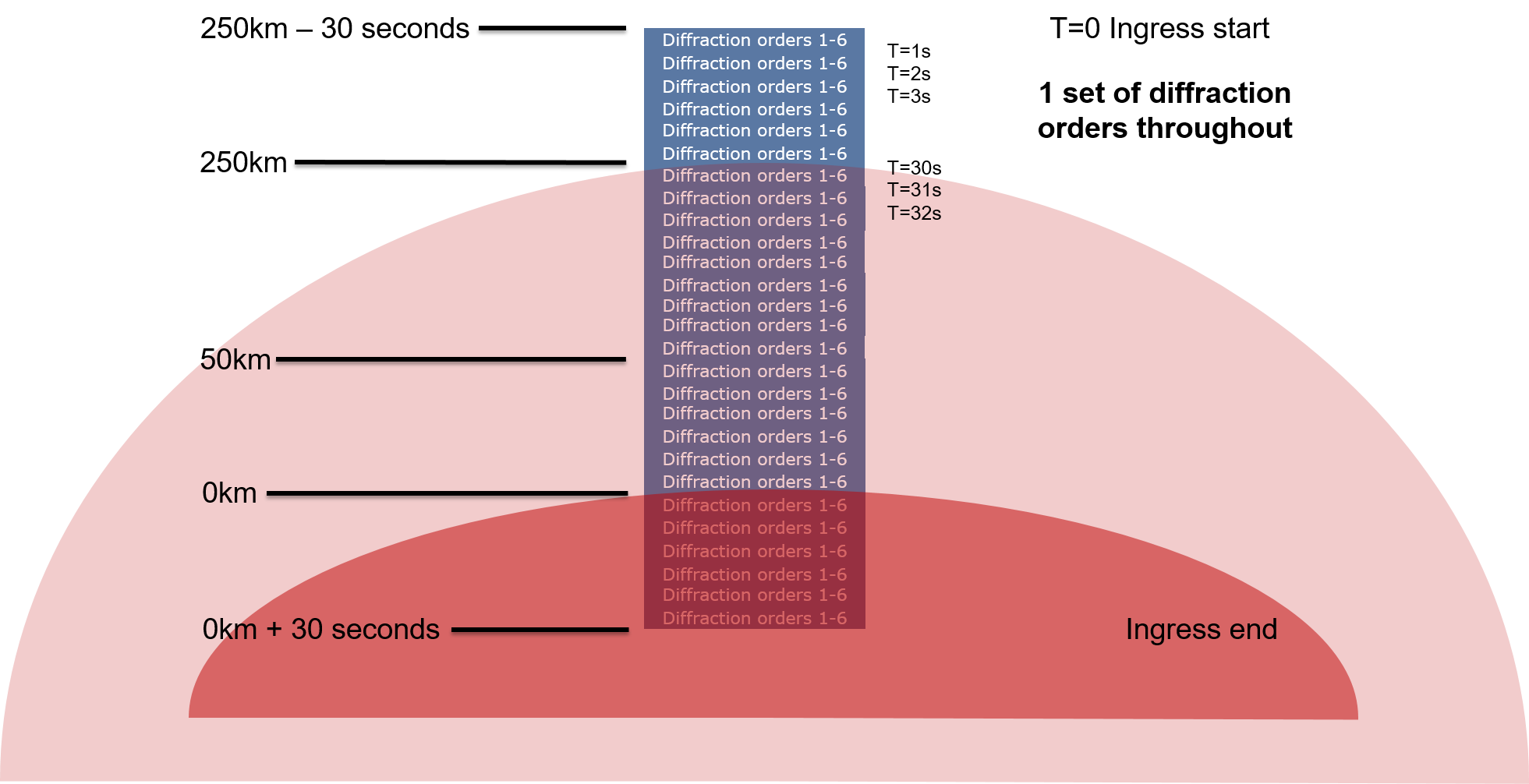
| Solar occultation (0-250km) | 5 diffraction orders + 1 dark per second, same order selection throughout. No onboard background subtraction |
| Solar occultation (50km switch, dark subtraction) | 6 diffraction orders per second, diffraction order selection changed at 50km. Dark frames subtracted onboard |
| Solar occultation (0-250km, dark subtraction) | 6 diffraction orders per second, same order selection throughout. Dark frames subtracted onboard |
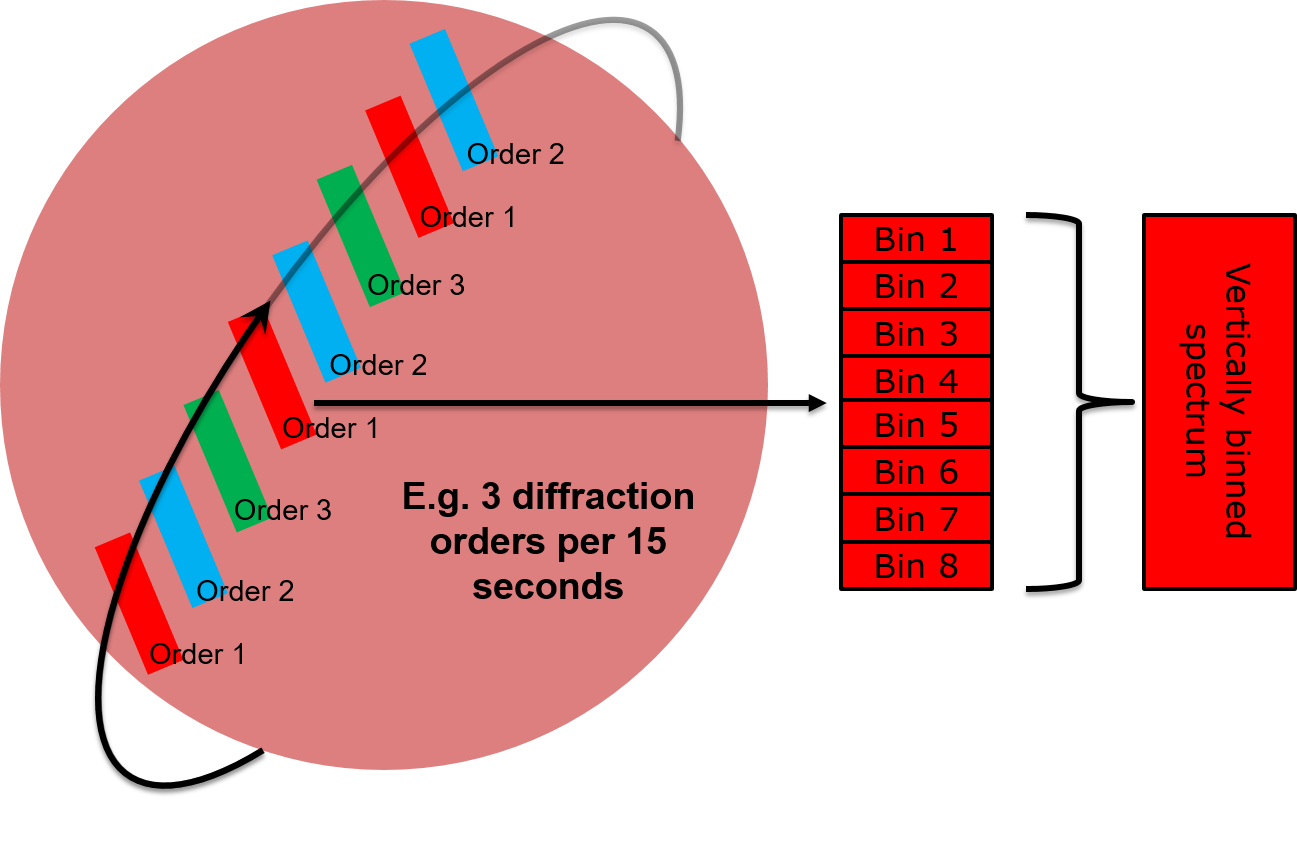
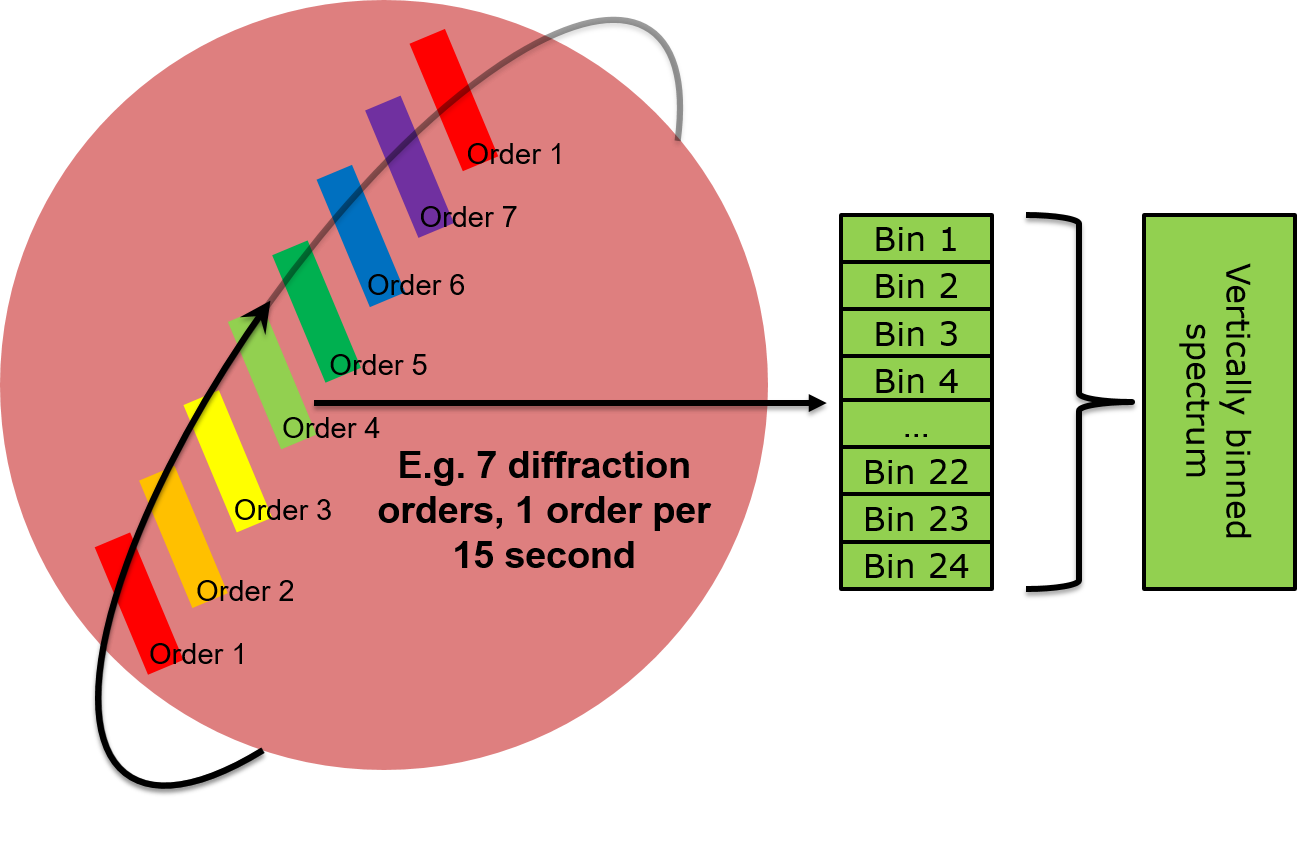
| Nadir | Nadir measurement of 2 to 6 diffraction orders per 15 seconds, dark subtracted onboard |
| Limb | Limb measurement of 2 diffraction orders per 15 seconds, dark subtracted onboard |
| ACS Boresight Limb | Special limb measurement of 2+ diffraction orders, measured during an ACS/MIR or ACS/TIRVIM solar occultation where line of sight is pointed close to the sun but not directly at the solar disk. Onboard dark subtraction |
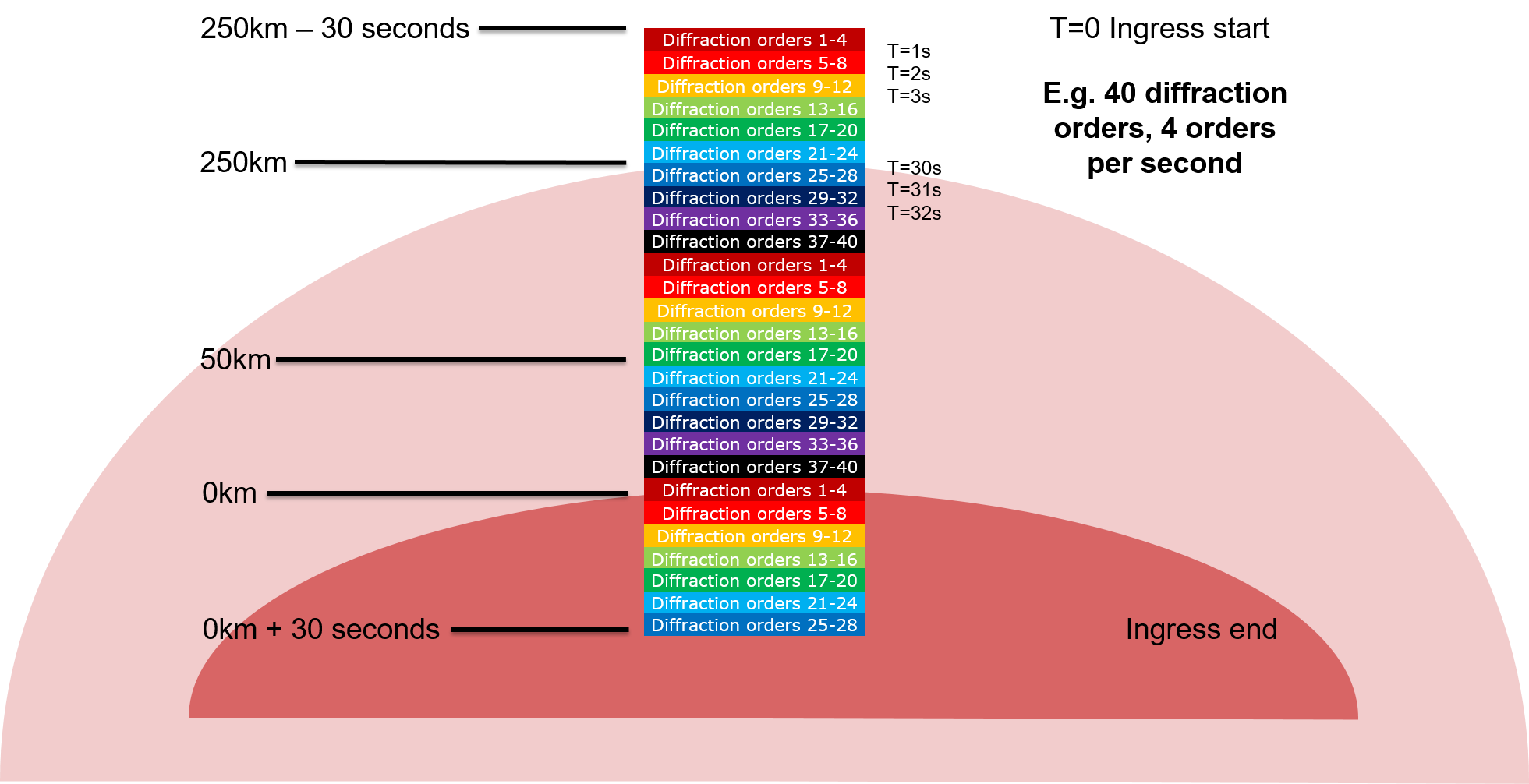
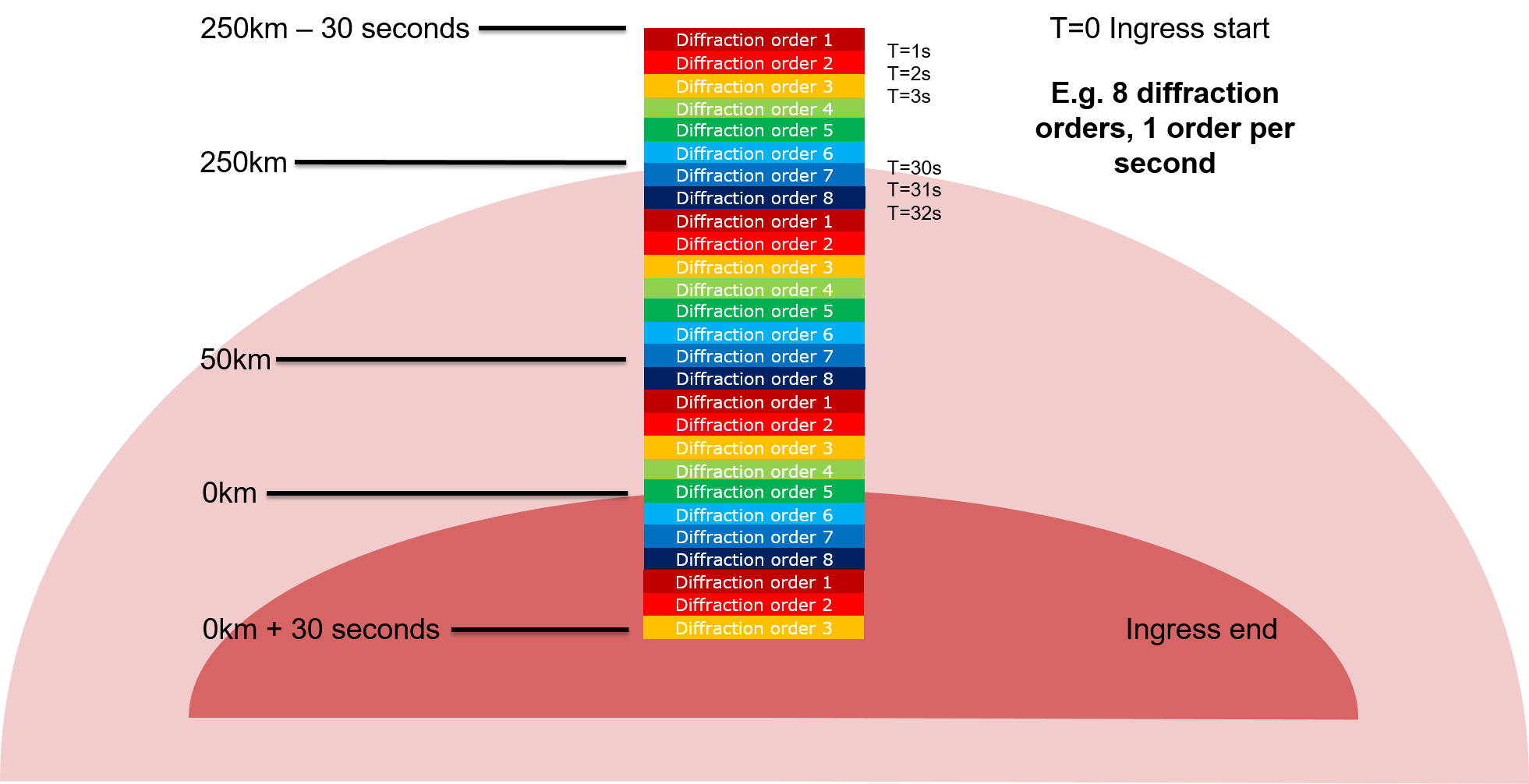
| Fullscan (slow) | Nadir, limb or occultation diffraction order stepping over any range/number of orders, dark subtracted onboard |
| Fullscan (fast) | Solar occultation order stepping over any range/number of orders at a high cadence rate, dark subtracted onboard |
| Calibration | Many types e.g. line of sight, solar fullscan, solar miniscan, integration time stepping, etc. |
| Measurement Types - UVIS Channel | Description |
|---|
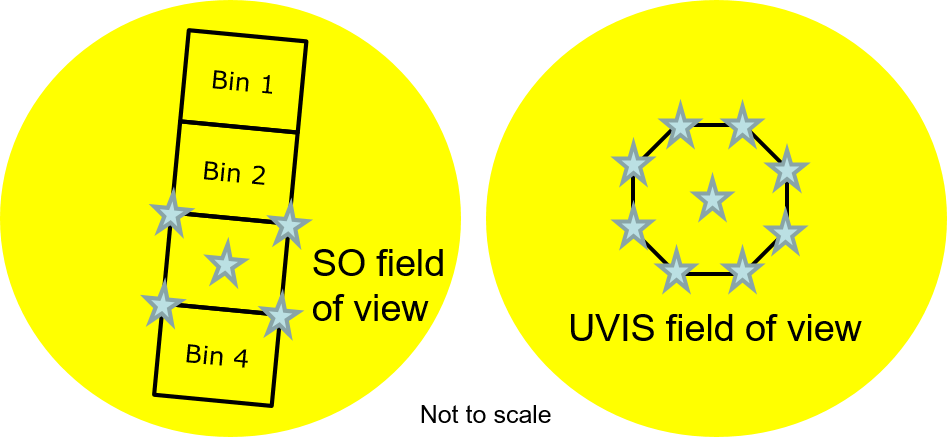
| Solar occultation (binned) | Detector pixel values are vertically binned onboard. 3 full or partial spectra are recorded per second. No dark subtraction is made onboard |
| Solar occultation (unbinned) | Each pixel value is stored individually. Full or partial spectra can be transmitted to Earth at a variety of cadence rates. No dark subtraction is made onboard |
| Nadir (binned) | Detector pixel values are vertically binned onboard. Full or partial spectra can be transmitted to Earth at a variety of cadence rates. Occasional dark frames are taken and transmitted to Earth |
Nadir (unbinned) | Each pixel value is stored individually. Full or partial spectra can be transmitted to Earth at a variety of cadence rates. Occasional dark frames are taken and transmitted to Earth |
| Calibration | Many types e.g. line of sight, integration time tests, etc. |
| Science/Y |
|---|
| Measurement 1, Bin 1, Pixel 1 | Pixel 2 | ... | Pixel 320 |
| Measurement 1, Bin 2, Pixel 1 | Pixel 2 | ... | Pixel 320 |
| Measurement 1, Bin 3, Pixel 1 | Pixel 2 | ... | Pixel 320 |
| Measurement 1, Bin 4, Pixel 1 | Pixel 2 | ... | Pixel 320 |
| Measurement 2, Bin 1, Pixel 1 | Pixel 2 | ... | Pixel 320 |
| Measurement 2, Bin 2, Pixel 1 | Pixel 2 | ... | Pixel 320 |